机械学院专栏《科苑·星坛》第十六期准时启航!本期将为大家介绍阮思朴老师。阮老师长期致力于服务机器人、机器人运动与路径规划、模仿学习、具身智能等前沿方向,在未知场景中的机器人操作、狭小空间运动规划等领域取得了多项创新成果。本期将为本科生提供“受限空间内服务机器人操作技能具身学习”小微项目,欢迎对机器人智能控制、路径规划、人工智能等领域充满兴趣的同学加入,共同推动机器人技术向更智能、更灵巧、更自主的方向迈进!
01 个人简介

阮思朴,欧亿体育机器人研究所教授、博导、国家级青年人才。主要研究方向包括服务机器人、机器人运动及路径规划、模仿学习、具身智能、计算几何等。2021-2024年曾任新加坡国立大学机械工程系博士后研究员。2020年于美国约翰霍普金斯大学获机械工程博士学位。本科毕业于哈尔滨工业大学机械工程专业。主持国家自然科学基金项目,以项目骨干身份参与美国NSF、美国ONR、新加坡NRF等科研项目。发表IEEE T-RO、IEEE RA-L、Research、CJME、IEEE CVPR、IEEE ICRA在内的学术论文20余篇。担任中国计算机学会智能机器人专委会执行委员、Robot Learning青年编委,ICRA、IROS副编辑,IROS会议分会场主席。
02 学术成果
1)未见场景中机器人操作具身模仿学习
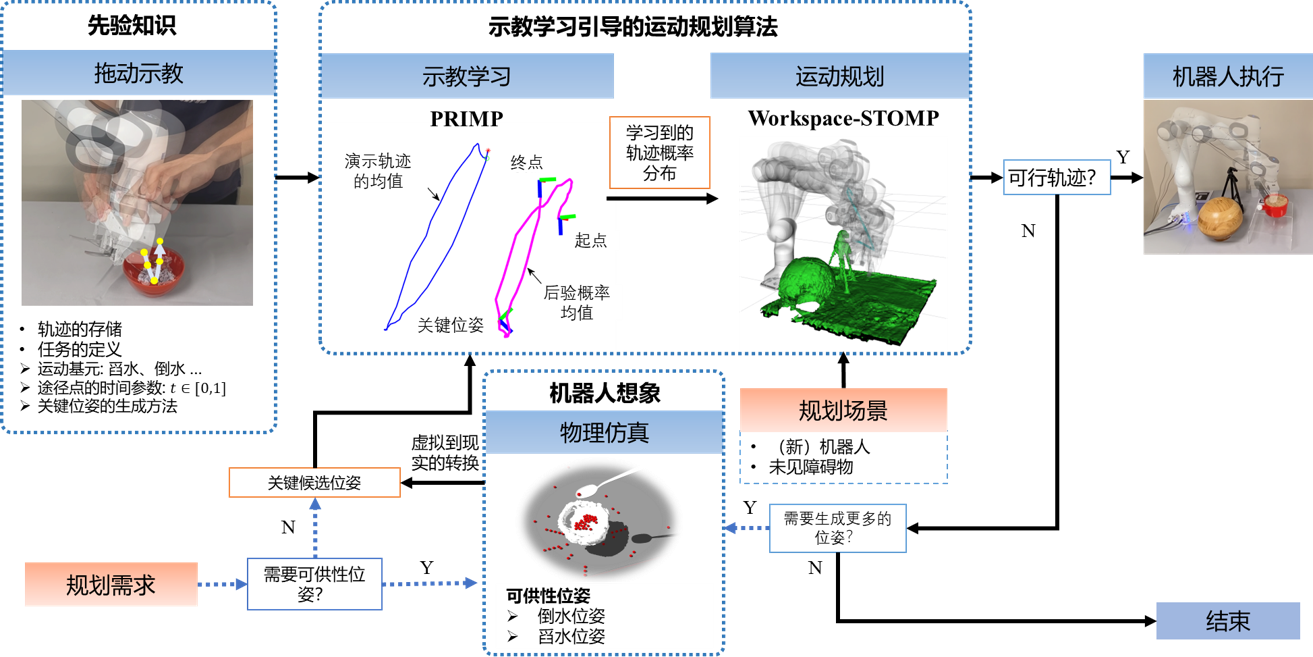
面向机器人在未知居家场景中执行复杂操作任务的需求,本研究提出了一种基于概率模型的模仿学习方法PRIMP(PRobabilistically-Informed Motion Primitives)与基于工作空间密度的机械臂轨迹规划算法Workspace-STOMP。通过学习物品可供性,在虚拟环境中模拟倒水、舀水等动作,得到机器人完成特定任务所需的关键末端六维位姿,从而生成全新操作轨迹,引导机器人操纵物品。所提出的算法提升了类人操作轨迹生成效率、新环境中避障成功率及任务完成度。相关成果发表于IEEE Transactions on Robotics (T-RO)期刊上。
2)狭小受限空间内机器人运动规划
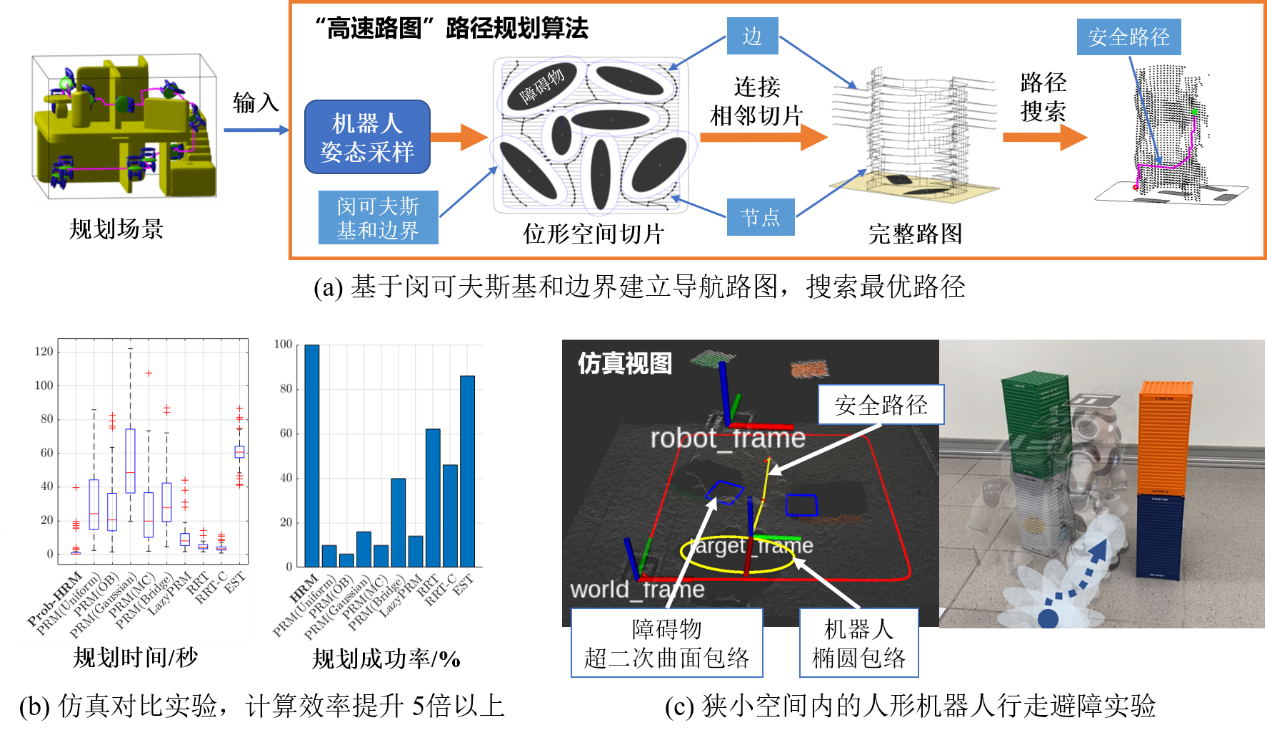
该项目提出了“高速路图(Highway Roadmap,HRM)”的路径规划算法,运用几何方法解决了机器人路径规划中关键的“狭窄空间”和“高自由度”的问题。其核心基于无碰撞位形空间边界的解析解。将机器人包络成椭球的集合,环境中的障碍物表示为具有光滑表面的严格凸体(例如超二次曲面)。通过计算位形空间障碍物边界,为机器人了提供无碰撞环境的先验经验,从而避免生成对于机器人无效的位形。进而,结合基于随机采样的路径规划算法,突破了高维问题中计算复杂度高的瓶颈,将所提的方法延伸到了多自由度的机器人上。相关成果发表在IEEE Transactions on Robotics (T-RO)期刊上。
03 项目介绍
受限空间内服务机器人操作技能具身学习
1)项目简介
随着劳动成本的提升、社会老龄化程度的加重,服务机器人的快速研发与升级成为迫切需求,在家庭服务、医疗康养、助老助残等贴近人们生活的领域起到举足轻重的作用。本研究主要面向服务机器人在复杂非结构化环境中高效精准操作的重大需求,聚焦三维场景感知与建模、动态环境中运动与路径规划、复杂操作技能的类人模仿学习等方向,进行服务机器人抓取与操作的理论、算法与应用研究。
2)主要工作
完成机器人物品抓取算法设计
完成机器人自主操作任务的相关算法设计与实现
配合硕博研究生完成算法对比实验
搭建并调试服务机器人样机系统
3)所需能力
具有良好的微积分、线性代数、概率统计等理论基础
了解机器人运动学、路径规划
运动控制、机器人学习相关算法
掌握Python、C++等编程语言
了解Ubuntu、ROS2等系统
4)联系方式
电子邮箱:ruansp@buaa.edu.cn
