机械学院专栏《科苑·星坛》第十五期准时启航!本期将为大家介绍石狄老师。石老师深耕运动康复与助力外骨骼机器人领域,在三维步态参数化生成、人机交互自适应控制、多场-双环按需辅助控制等方向取得多项创新性成果,成功破解外骨骼机器人与人体三维步态匹配、人机协调性不足等核心难题。本期特为本科生带来 “柔性可穿戴外骨骼机器人系统设计” 小微项目,诚邀具备机械、电子或控制类相关知识,热爱多学科交叉探索、拥有良好团队协作能力的同学加入,推动柔性外骨骼机器人技术在康复训练、助老助行等场景的创新突破与实际应用。
01 个人简介

石狄,博士,副教授,博士生导师。博士毕业于北京航空航天大学机械工程机自动化学院,主讲课程《机器人技术基础》《人形机器人技术基础与前沿》《空间机构非线性动力学与控制》等。长期致力于运动康复与助力外骨骼机器人相关研究,主持和参与国家自然科学基金项目、国家重点研发计划等纵向项目6项以及相关横向课题5项,发表高水平论文20余篇(含ESI高被引论文1篇),获2022年中国机械工程学会优秀论文奖和北航校级优秀博士学位论文、机械工程学报第五届高影响力论文奖。
02 学术成果
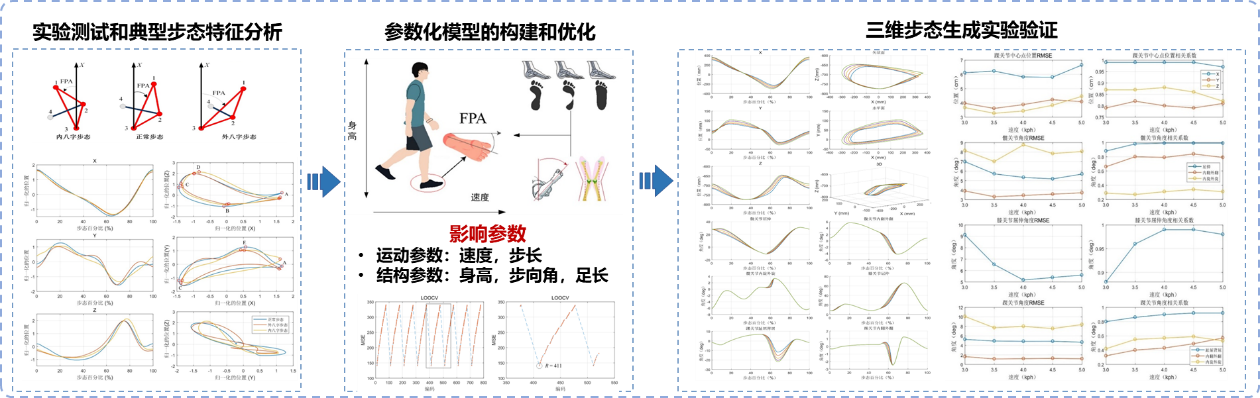
1)三维步态参数化生成
分析了运动、结构参数对三维步态的影响规律,提出了一种三维步态的参数化生成方法,实现了适应人体不同运动和结构特征的三维步态生成,解决了目前多数外骨骼机器人生成的平面步态与人体三维步态特性以及人体运动结构特征匹配性不足的问题。
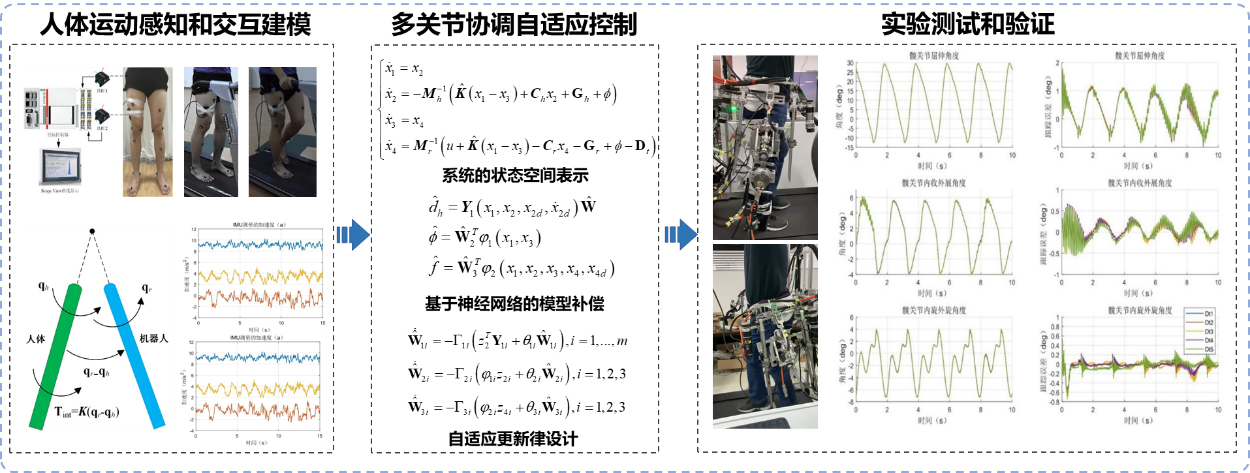
2)以人为中心的人机交互自适应控制方法
分析了人机交互作用机理,综合考虑了参数不确定性和系统建模准确性对系统误差的影响,提出了一种针对串并混联外骨骼机器人的以人为中心的多关节协调自适应控制方法,解决了由于忽略人机之间实际运动偏差带来的被动控制模式下人机顺应性不足的问题。
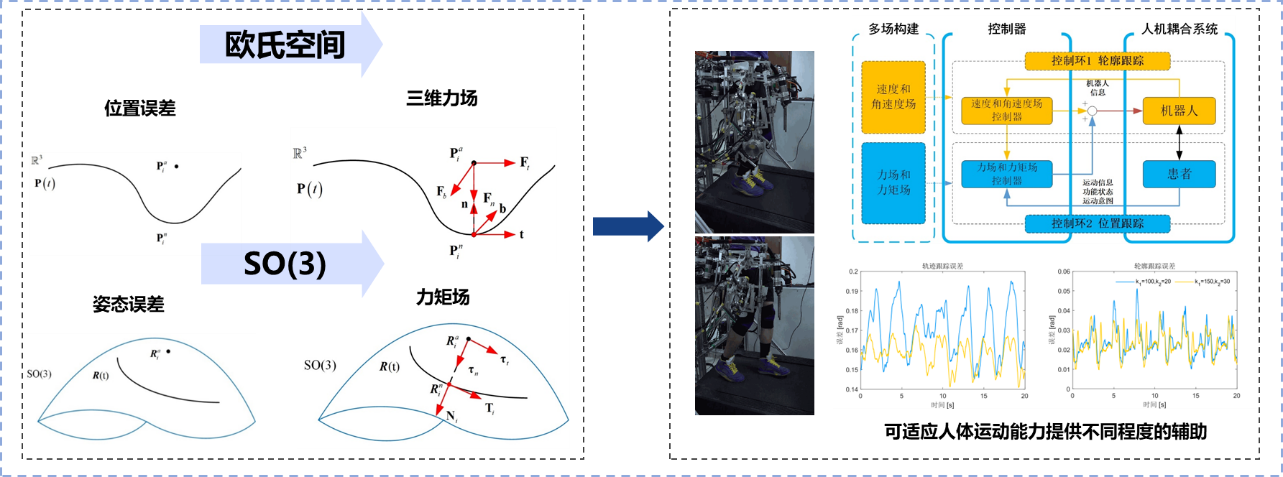
3)多场-双环的按需辅助控制方法
面向三自由度关节的主动康复训练,综合考虑了人机运动偏差对系统误差的影响,提出了一种基于多场-双环的控制构架的按需辅助主动控制方法,解决了目前主动控制方法主要面向平面步态而不是三维步态带来的人机协调性不足的问题。
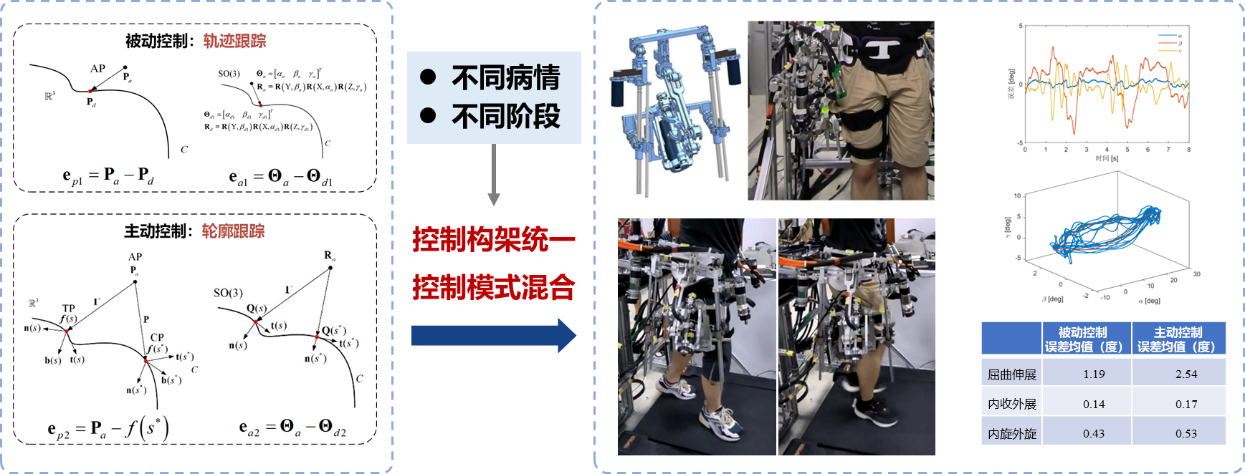
4)主被动结合的混合切换控制方法
揭示了机器人辅助力矩对患者姿态的影响规律,提出了主被动模式下的轮廓/轨迹跟踪误差表达及其跟踪控制方法,实现了多模式混合控制,进行了可穿戴实验验证,提升了机器人辅助康复训练过程与不同病情阶段的适应性。
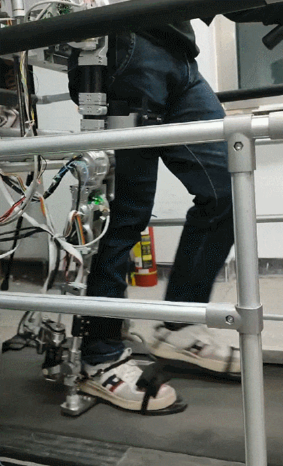
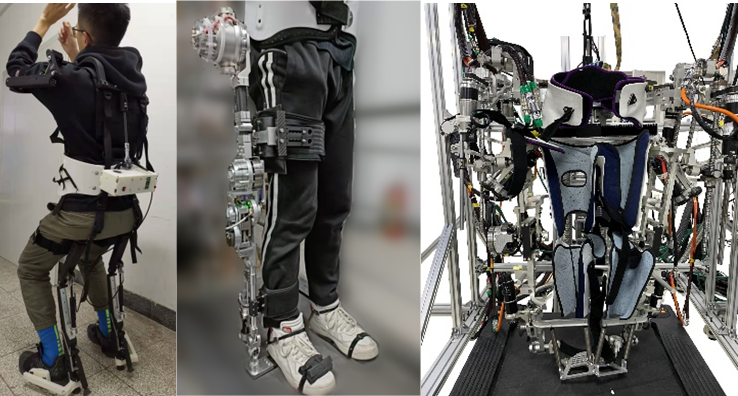
5)外骨骼机器人样机研制和测试
03 项目介绍
1)项目简介
柔性可穿戴外骨骼机器人突破传统刚性外骨骼机器人的局限,在康复训练、助老助行、运动增强等场景具有显著优势。本项目拟融合新型材料、柔性驱控、具身智能等前沿技术,在结构驱动、智能感知、人机协调控制等方面展开探索性探究,构建新型柔性外骨骼机器人系统
2)所需能力
机械、电子或控制类相关知识
多学科交叉问题探索能力
团队协作能力
3)相关事项
项目周期:3-6个月
所需人数:1-3名本科生
4)联系方式
电子邮箱:shidi@buaa.edu.cn
04 老师寄语
感谢同学们关注,期待同学们加入
共同成长,进步!
